[Edit 16.1.2022]
Übersicht über diesen Thread:
- Dieser Post: Wie ich mein QGIS-Projekt gestaltet habe
- Post #6: Wie man sich anhand eines vergrößerten Cursors beim Aufzeichnen der AB-Linien eines Lenksystems an den Grundstücksgrenzen der QGIS-Karte orientieren kann.
- Post #12: Wie man sich durch eine parallele Kopien der Polygongrenzen AB-Basis-Linien innerhalb QGIS anzeigen lassen kann.
- Post #24: Wie ich Punkte mithilfe meines GNSS-Empfängers erfasst und in die Feldstückskarte von IBALIS hochgeladen habe.
(Die Felder "Post #x" können angeklickt werden und führen direkt zu den Posts.)
[Ende des Edit]
Hier möchte ich als Beispiel zeigen, wie ich bei mir QGIS (Version 3.6.1) eingerichtet habe.
Damit stelle ich meine Schläge mit ein paar Informationen aus dem Shapefile meines Mehrfachantrages in IBALIS, sowie die Feldstückskarte Bayern aus dem Geoportal.Bayern.de dar, und habe eine Shapefile angelegt, in der ich selbstgemessene Punkte speichern kann. Als Hintergrund dient das Satellitenbild von Google Maps oder alternativ eine topographische Karte von OpenStreetMap.
Hier die einzelnen Schritte:
Herunterladen und Installieren der "eigenständigen QGIS Installation Version 3.6." (3.6.1) von der Webseite QGIS.org.
Öffnen von "QGIS Desktop 3.6.1".
Einbindung von Google Earth:
Falls das Bedienfeld "Browser" nicht angezeigt wird, unter "Ansicht" - "Bedienfelder" - "Browser" aktivieren.
Im Feld Browser auf "XYZ Tiles" rechtsklicken und "Neue Verbindung" anklicken.
Name vergeben und im Feld URL "https://mt1.google.com/vt/lyrs=y&x={x}&y={y}&z={z}" angeben.
Im Browserfenster auf den Layer doppelklicken.
Im Layerbaum (evtl. ebenfalls über "Ansicht" - "Bedienfelder" - "Layer" aktivieren,) kann man über Doppelklicken auf den neuen Layer die Einstellungen anpassen. Z.B. kann man über "Transparenz" einstellen, dass andere Layer durch die Karte durchscheinen können. Ruft man "Legende" auf, kann man "Deckkraftschieber" anklicken und mit der Pfeiltaste ins rechte Feld kopieren. Dann wird im aufgeklappten Layerbaum ein Schieberegler angezeigt, mit dem man diese Transparenz ("Opacity) jederzeit einfach anpassen kann.
Die Anleitung zum Einbinden von Google Earth stammt aus https://geogeek.xyz/how-to-add…aps-layers-in-qgis-3.html. Zudem sind dort weitere Dienste genannt, die auf diese Weise eingebunden werden können.
Einbindung von OpenStreetMaps:
Wer statt der Satellitenkarte lieber eine topographische Karte hinterlegen möchte, kann dies beispielsweise mit OpenStreetMaps tun. Hierzu wird das Openlayer-Plugin im Gegensatz zu den früheren QGIS-Versionen 2.x offensichtlich nicht mehr benötigt. Beim Doppelclick auf "XYZ Tiles" im Feld "Browser" (vgl. vorhergehender Absatz) war OpenStreetMaps nach der Neuinstallation von QGIS 3.6.1 bei mir bereits vorhanden. Durch Doppelklicken auf dem Namen wird der Layer zum Layerbaum hinzugefügt.
Wenn OpenStreetmap in "XYZ Tiles" nicht angeboten wird, sollte die neue Verbindung analog zu Google Earth als neue "XYZ Tile"mit der URL "http://a.tile.openstreetmap.org/{z}/{x}/{y}.png&zmax=19&zmin=0" geöffnet werden können. Die Transparenz lässt sich in gleicher Weise wie beim GoogleEarth-Layer einstellen.
Einbindung der Shapefile aus dem Agrarantrag (Mehrfachantrag aus IBALIS):
Die Bereitstellung und der Export der Feldstücke aus dem Mehrfachantrag erfolgt in IBALIS unter "Betriebsdaten" - "Export". Nachdem die Dateien generiert sind, kann man sie unter "Ergebnis der Abragen" auf die Festplatte des Rechners herunterladen.
Zum Einbinden wählt man im Menü "Layer" - "Layer hinzufügen" - "Vektorlayer hinzufügen". Als Quelltyp lässt man die Voreinstellung "Datei" stehen, und wählt über "..." bei Quelle den Pfad und diejenge der heruntergeladenen Dateien, die die Endung ".shp" trägt.
Unten im Eingabefeld "Hinzufügen" und dann "Schließen" anklicken. Daraufhin wird die Shapfile in der Karte angezeigt. Durch Doppelklicken des Layers im Layerbaum lassen sich die Layereigenschaften bearbeiten:
- Transparenz analog Google Earth über den Eintrag "Legende"
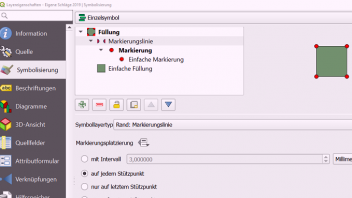 - In "Symbolisierung" - "Einzelsymbol" kann über "Füllung" - "Einfache Füllung" die Farbe oder das Muster für die Füllung gewählt werden. Um die Stützpunkte (z.B. Grenzsteine) hervorzuheben kann man hier mit dem grünen "+"-Zeichen einen weiteren Eintrag zu den Attributen generieren. Für diesen wählt man dann als Symbollayertyp statt "Einfache Füllung" "Rand: Markierungslinie" und dort als "Markierungsplatzierung" "auf jedem Stützpunkt" aus.
- In "Symbolisierung" - "Einzelsymbol" kann über "Füllung" - "Einfache Füllung" die Farbe oder das Muster für die Füllung gewählt werden. Um die Stützpunkte (z.B. Grenzsteine) hervorzuheben kann man hier mit dem grünen "+"-Zeichen einen weiteren Eintrag zu den Attributen generieren. Für diesen wählt man dann als Symbollayertyp statt "Einfache Füllung" "Rand: Markierungslinie" und dort als "Markierungsplatzierung" "auf jedem Stützpunkt" aus.
- In "Darstellung" lässt sich durch Markieren von "Maßstabsabhängige Sichtbarkeit" wählen, ab welchem Kartenmaßstab der Layer überhaupt angezeigt werden soll. Ich habe hier als Minimum 1:100.000 gewählt.
- In "Diagramme" - "Textdiagramm" anstelle von "keine Diagramme" habe ich dann mit "Nummer", "Name", "FID" und "Fläche" Daten ausgewählt und mit dem "+"-Zeichen in das rechte Feld verschoben, die ich in einem Kreis zu meinem Schlägen anzeigen lasse. Durch Doppelklicken der Einträge in dem rechten Feld kann man dann die Textfarben anpassen. Die "Maßstabsabhängige Sichtbarkeit" lässt über den Eintrag "Darstellung" im Untermenü unter "Textdiagramm" separat einstellen.
Einbindung der Feldstückskarte Bayern
Mit "Layer" - "Layer hinzufügen" - "WMS/WMTS-Layer hinzufügen..." -"Neu" lässt sich eine Verbindung zur Feldstückskarte Bayern anlegen. Dazu ist ein Name zu vergeben und als URL "https://geoservices.bayern.de/wms/v1/ogc_feka.cgi?" einzutragen. Nach dem Klicken auf "Verbinden" in der Übersicht ID 0 auswählen und unten mit Hinzufügen bestätigen. Damit werden bei ausreichender Kartenauflösung die Feldstücksgrenzen, FID-Nummern und Landschaftselemente unabhängig vom Bewirtschafter angezeigt.
Die Shapefile und die Feldstückskarte Bayern enthält die Bewirtschaftungsgrenzen mit den Stützpunkten, wie sie in der Antragsstellung festgelegt wurden. Weichen die Bewirtschaftungsgrenzen von den tatsächlichen Flurstücksgrenzen ab, oder wurde beim Digitalisieren der Bewirtschaftungsgrenzen nach den Grenzen in der Feldkarte von IBALIS vergessen, das -"Snapping-Tool" (Magnet) zu aktivieren, sind die Markierungen zum Suchen tatsächlicher Grenzen nicht geeignet. Auch sonst ist bei den Grenzpunkten aus der Antragsstellung nur eine Genauigkeit von 40 cm gewährleistet. In meinen Testmessungen befanden sich (noch vorhandene) Marksteine aber stets innerhalb des Einstichbereichs einer Mistgabel, wenn man mit dieser über Kreuz über der am Boden liegenden Antenne einstach.
Erstellen einer Erfassungsdatei für eigene Aufzeichnungen:
Mit "Layer"- "Layer erstellen" - "Neuer Shapedatei-Layer..." lassen sich Shapedateien für die Aufzeichnung von Positionen erstellen. Zum Aufzeichnen kann man dann das Stiftsymbol  und daneben das Symbol "Punktobjekt hinzufügen"
und daneben das Symbol "Punktobjekt hinzufügen"  oder durch "Punkt hinzufügen" im GPS-Fenster betätigen.
oder durch "Punkt hinzufügen" im GPS-Fenster betätigen.
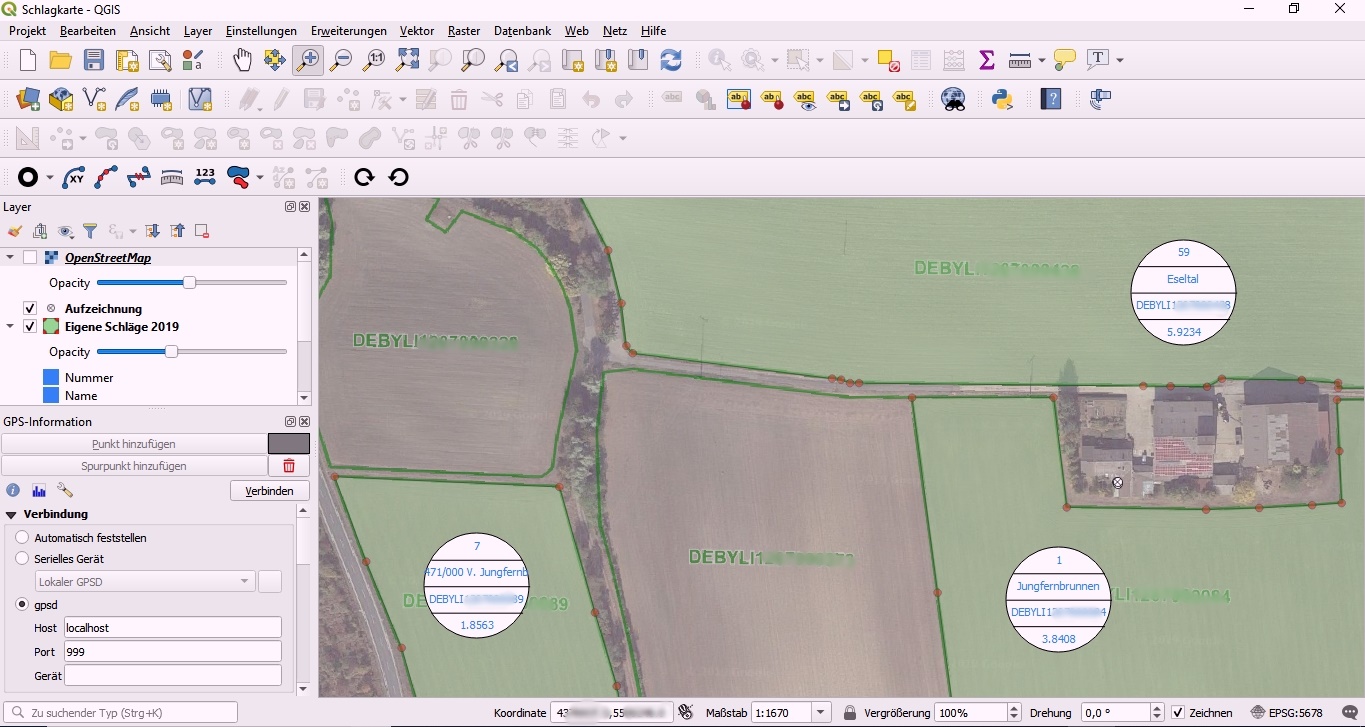
Fertig sieht das Ganze dann wie folgt aus:











{kind=link}